世界初、可動部が一切ない自動運転用ソリッドステートLiDARを開発【NEDO、SteraVision】
DX/IoT/AI 無料遠方や濃霧といった“霧の先”の状況と速度の同時検出を可能に
NEDOは2月21日、NEDO のプログラムに取り組むSteraVisionが、世界で初めてスキャナーの可動部を一切なくし、量産性を向上させた、ソリッドステートLiDARを開発したと発表した。
SteraVisionは、2019年12月からNEDOの「戦略的省エネルギー技術革新プログラム」で燃費効率の良い自動走行システムの実現に向け「長距離・広視野角・高解像度・車載用LiDARの開発」に取り組んでおり、今回の開発に至ったという。
本件のソリッドステートLiDARは、デジタル信号を加えることで光ビームの方向をスキャンできるようにしたのが特長だ。これにより、モーターなどで光ビームを移動させる従来方式で指摘されていた、信頼性の問題を解消したという。
さらに、SteraVisionのスキャナー「MultiPol」(※)と光コヒーレント技術「FMCW(Frequency Modulated Continuous Wave:周波数連続変調)」を組み合わせ、肉眼では確認できない遠方や濃霧、煙などのいわゆる“霧の先”を見ると同時に、速度も検出することを可能にした。
※MultiPol:液晶を用いて光をスイッチすることで、光ビームを高速にスキャンするデバイス(SteraVisionの登録商標)
また、このLiDARを用いてカメラと融合させた自動運転車向け認識技術(パーセプションAI)と連動することで、カメラだけでは検出困難な“霧の先”を重点的にスキャンし、“見たいところを必要なだけ見る”ことができる人間の目のような機能を持った視覚システムを実現したという。
NEDOは「今後、レベル4とレベル5の自動運転やFA、ロボティクスシステム、セキュリティなど多くの分野への適用をめざし、予知運転に伴う省エネ化を進める」と説明している。
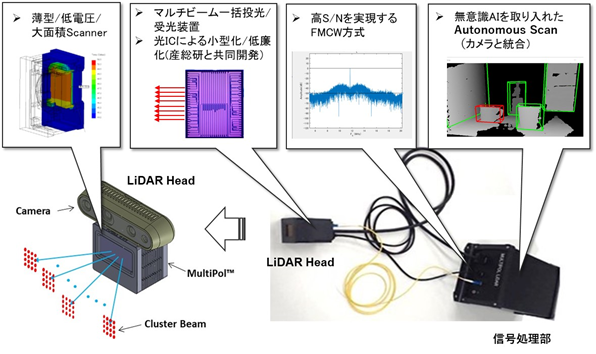
図1:今回発表されたソリッドステートLiDAR。
概要
自動車の自動運転が現実的な段階に入り、その実現を支える技術としてレーザ光を照射・走査して対象物までの距離を計測したり、性質を特定したりする光センサ技術(LiDAR)が注目を集めている。
NEDOは「人間の目を超える高性能LiDARによる自動運転車は、省力化や人為的ミスによる事故の撲滅ばかりでなく、無駄な加減速を排除した予知運転による、高い省エネルギー効果が期待できる。このため、市販車に搭載できる高性能なLiDARの開発が課題となっており、LiDARを含むレーザ機器の市場規模は2030年に約4959億円と、2017年の200倍に拡大すると言われている」と説明する。
このような背景の下、NEDOの「戦略的省エネルギー技術革新プログラム」において、SteraVisionは2019年12月から、燃費効率の良い自動走行システムに必須の高性能LiDAR開発による省エネ化をめざす、「長距離・広視野角・高解像度・車載用LiDARの開発」に取り組んでおり、今回、世界で初めてスキャナーの可動部をなくし、シンプルな構造とすることで量産性を向上させたソリッドステートLiDARを開発した。
これは可動部が一切ない液晶を用いた方式で、光の偏光方向を高速でスイッチし光ビームスキャンすることで実現した。これにより、モーターやMEMSミラーなどの可動部を動かして光ビームをスキャンさせる従来方式で生じていた、金属疲労などによる動作停止といった信頼性の問題や、外部振動からの不安定性を解決した。
従来の光ビームは画角内で一筆書きのようにスウィープさせて、アナログに走査する方式だった。これを今回、位置を特定せず高速にデジタルスイッチする方式に変更している。これにより、対象までの距離に関係なく、光ビームをランダムに切り替えて自動運転に重要なシーンを選択しピックアップすることが可能となった。NEDOは「これは、あたかも人間の目が、重要なシーンを選択しピックアップするように、自動運転に適した効率的な視覚システムが構築できたことを意味する」としている。
また従来方式では、光パルスを物体に照射し、物体から戻ってきた光の粒(フォトン)を検出してその時間差を出す方式(ToF)が主流だったが、今回、光の波の性質を利用した方式(FMCW)を開発したことで、遠方や濃霧、煙など、いわゆる”霧の先”の物体検出と速度の直接検出を可能にしたという。
NEDOは「今後、レベル4とレベル5の自動運転やFA、ロボティクスシステム、セキュリティなど多くの分野への適用をめざし、予知運転に伴う省エネ化を進める」としている。
今回の成果
今回開発したソリッドステート光ビームステアリング素子MultiPolによって、多ビーム同時走査となるマルチスキャン化をし、2波長のビート信号を用いたDualビート方式による長距離高精度測距(※)を行う一連のシステムを開発した。
併せて、光集積回路によるワンチップ化、および人間の視覚のように前方のシーンから重要な部分を選択的にピックアップして認識する「無意識AI」を取り入れたAutonomous Scanを開発している。
NEDOは「これらの開発により、市販車用自動走行システムに必要な長距離・広視野角・高解像度・車載用高性能LiDARを実現した。本高性能LiDARを用いることで、道路や交通状況を把握して早めに対処する『予知運転』を実現した結果、燃費向上による15.2%のエネルギー削減につながり、脱炭素社会に大きく貢献する」と説明している。
※Dualビート方式による長距離高精度測距:二つの波長を用いて、その差分のビート信号を検出することで振動に強い距離・速度計測が実現できる方式。
それぞれの成果は次のとおり。
ソリッド・ステートスキャナー「MultiPol」を実現
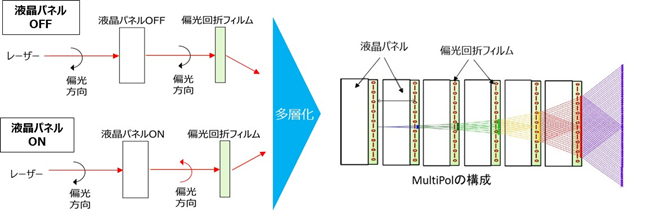
図2:開発したソリッド・ステートスキャナーの動作原理。
ソリッド・ステートスキャナー「MultiPol」は、可動部のない液晶を用いて光の偏光をスイッチすることで、光ビームを上下(左右)に高速スイッチする方式だ。これまでのような機械的に可動させるアナログなスキャンから、可動部が一切なくデジタルにスキャンできるソリッド・ステートスキャナーを実現している。
フォトニックICを用いた小型化・高性能化
これまでFMCWのボトルネックであった小型化・高性能化を実現するため、多くの光部品(光方向性結合器、Y分岐器など)を1チップに集積した。これにより、同時に多くの光ビームをスキャンでき、小型化・低価格化が可能となる。
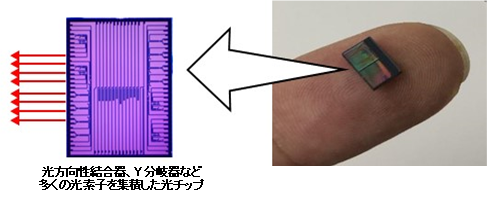
図3:開発したフォトニックIC。
カメラ画像およびパーセプションAIとLiDARを融合した重みづけスキャン
従来はLiDARとカメラは独立したセンサだったが、今回発表された方式は、LiDARによる物体検出とカメラ画像の自動運転車向け認識(以下、パーセプションAI)を融合した(図4)。
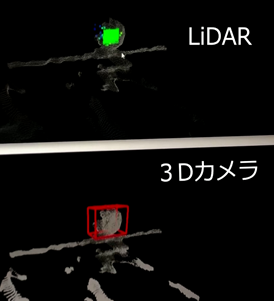
図4:カメラ画像・パーセプションAIと、LiDARを融合した重みづけスキャンの例。LiDARによる物体検出(上図)を3Dカメラ画像(下図)と融合して、パーセプションAIにより認識(下図の赤枠部分)させている。
これにより、カメラ画像だけでは検出困難な遠方や“霧の先”の重要な物体を、パーセプションAIの指示のもと選択的にLiDARでスキャンし、物体を検出・追跡することで、より信頼性の高い視覚システムを実現した。これにより、光ビームを一筆書きでアナログに操作し全シーンを計測した後にフレームをリフレッシュするこれまでの方式から、選択的に抽出した重要なシーンの計測後に直ちにフレームをリフレッシュできるため、高速での追跡が実現した。NEDOは「“見たいところを好きなだけ詳しく見る”人の目のような効率的な視覚システムが可能となる」としている。
今後の予定
SteraVisionは今後、NEDO事業の中で自動運転やFA、ロボティクスシステム、セキュリティなど様々な分野の顧客ニーズにあわせソリッドステートLiDARの性能をチューニングし、今年の7月頃からサンプル出荷を進めて応えていく予定だ。
NEDOは「今後も経済成長と両立する持続可能な省エネルギーの実現を目指し、『省エネルギー技術戦略』で掲げるエネルギー・産業・民生(家庭・業務)・運輸部門などにおける重要技術を中心に、2030年には高い省エネ効果が見込まれる技術について、事業化までシームレスに技術開発を支援する」としている。