製造現場を支える無線システムの安定化技術の実験に成功【NICT、トヨタ】
DX/IoT/AI 無料無線の可視化と異種システム協調制御で“止まらないライン”を実現
NICTとトヨタ自動車は11月25日、製造現場を支える無線システムの安定化技術の実験に成功し、“止まらないライン”を実現したと発表した。
“止まらないライン”は、無線の可視化によって登録外の端末の持込みを検出し、計画外の無線の混雑を抑制することと、それでも発生してしまう突発的な干渉を異種システム協調制御によって回避することで、実現できる。今回、これらの技術を2か所の稼働中のトヨタ自動車の工場において、それぞれ実証したという。
- トヨタ自動車高岡工場における実証: NICTが開発した無線環境のリアルタイム可視化技術の検証を、実際に稼働中の組立ラインで実施し、製造ラインの無線システムに影響を及ぼす前に登録外端末を検出できることを確認した。
- トヨタ自動車元町工場における実証: NICTが開発した異なる無線通信システム間の協調制御によって安定した無線通信を可能にするSRF無線プラットフォームの検証を実施した。その結果、無線の混雑度に応じて適切な通信経路を確立するなど、同プラットフォームの有効性を確認することができた。
今後、トヨタ自動車では、製造現場での無線システムの適切な管理のため、本可視化技術を他の工場にも順次導入していく予定だ。NICTは「トヨタ自動車の他の工場でも本可視化技術の実証実験を継続するとともに、SRFプラットフォームの研究開発を推進し、工場において無線システムの安定化技術の実用化を目指す」としている。
背景
製造現場では、生産性向上のため生産設備の柔軟性を高める目的で、無線通信を用いた製造システムの導入が年々進んでおり、今後も更に増加するものと予想される。一方で、無線通信技術は、個人の生活と切っても切れないものになっている。製造現場では、日々、多くの人々がモノづくりに取り組んでいますが、モバイルルータなど人に付随する無線通信が意図せず製造ラインにおける無線システムに悪影響を及ぼす場合がある。
このような事態を避けるため、NICTとトヨタ自動車は、製造現場の無線環境の可視化に2015年から共同で取り組んできた。図1は、人が電波を発する端末と共に現場内を移動した際に、端末からの電波が到達する範囲をセンサにより可視化したもの。
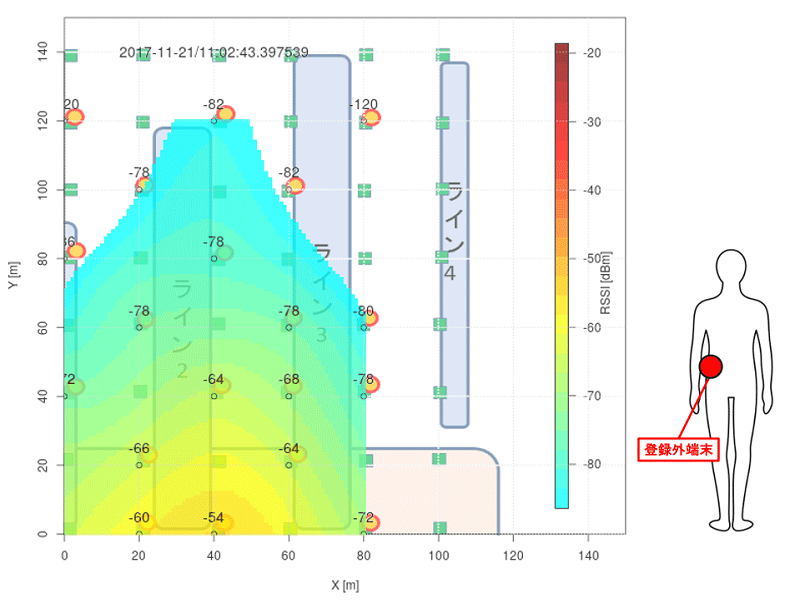
図1:無線環境のリアルタイム可視化技術の実験イメージ(右)と可視化画面(左)
左図の黄色の○印に設置したセンサからの情報を解析することで、電波到達範囲を強度と色で示し、登録外端末の位置を特定。
X軸、Y軸: 工場内の距離〔m〕
○印の上の値: RSSI(電波強度)〔dBm〕
また、多くの製造システムの無線化が進むと、無線システム間の干渉による通信の不安定化や設備稼働への影響といった懸念もある。NICTでは、2015年から、製造現場の無線化を推進するFlexible Factory Project の活動を実施しており、同活動を通して得られた知見を活かし、異種無線通信の協調制御により無線通信を安定化させるSRF無線プラットフォームの研究開発を推進してきた。また、研究開発の成果を社会実装していくため、2017年7月に、SRF無線プラットフォームに高い関心を持つ企業と共にフレキシブルファクトリパートナーアライアンス(FFPA)を設立し、技術仕様の標準化を推進してきた。そして、2019年9月には、SRF無線プラットフォームの技術仕様書ver.1.0を発行している。
今回の成果
今回、NICTとトヨタ自動車は、2か所の稼働中のトヨタ自動車の工場において、製造現場を支える無線システムの安定化技術の共同実験を実施し、“止まらないライン”の実現に成功した。
一つ目は、無線環境のリアルタイム可視化技術の効果の検証で、トヨタ自動車高岡工場で稼働中の組立ラインにおいて、共同実験を実施した(図1参照)。同可視化技術は、アクセスポイントからの電波がどこまで届いているかを管理画面上のフロアマップに可視化する。また、事前に登録されていないモバイルルータなどの無線端末が工場に持ち込まれた際に検出してアラートを表示し、管理者に注意喚起を行う。2019年末から、必要となる機器の設置等を行い、建屋全体の可視化に挑戦し、数か月にわたる効果検証の結果、電波到達範囲の可視化と登録外端末の検出が可能であることが確認できた。
今後、トヨタ自動車は、製造現場での無線システムの適切な管理のため、同可視化技術を他の工場にも順次導入していく予定だという。
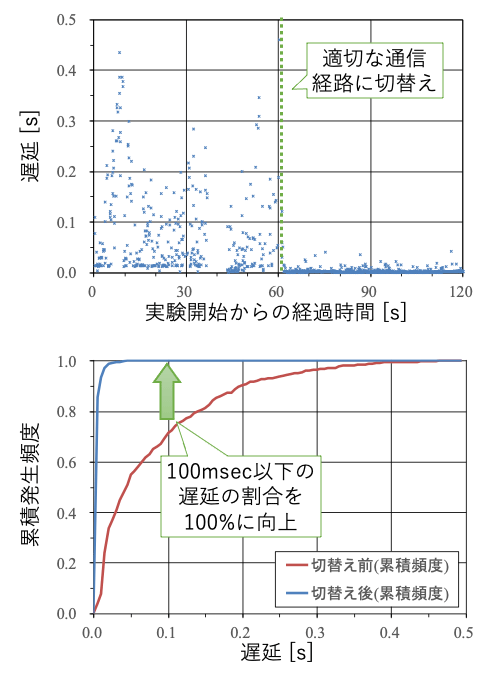
図2:SRF無線プラットフォームの実証実験結果
上図は遅延の時間変化。下図は遅延の発生頻度。
二つ目は、異種システム協調制御の実環境での機能の検証で、トヨタ自動車元町工場において、SRF無線プラットフォームの実証実験を実施した。同プラットフォームは、他の無線システムとの協調制御を行うため、無線の環境を常に監視し、適切な通信経路や通信方式を動的に選定する。今回の実証実験では、トヨタ自動車元町工場にて、製造ラインで使われているものと同じ周波数帯の試験用通信を発生させ、この試験用通信の遅延を評価した。その結果、Field Manager(管理サーバ)からの制御により、適切な通信経路に切り替えることで、遅延を大幅に低減し、100msec以下の遅延を満たす割合を100%に向上できることを確認した(図2参照)。
100msec以下の遅延を保証することにより、無線化が検討されている製造システムの8割以上を安定稼働させることができる。この実験結果により、SRF無線プラットフォームを使用することで、実際の製造ラインに新たに無線アプリケーションを導入した際に、要求遅延を満足できることを実証した。
無線の可視化によって登録外の端末の持込みを検出することで、計画外の無線の混雑を抑制することと、それでも発生してしまう突発的な干渉をSRF無線プラットフォームで回避することで、“止まらないライン”を実現することができる。今回、これらの技術の有効性が稼働中の工場で確認できたことで、人と機械の共存する製造現場において、無線通信技術を用いた製造システムの安定稼働が可能になるものと期待される。
今後の展望
NICTは今後について「無線環境のリアルタイム可視化技術をトヨタ自動車の他の工場に順次展開し、実証実験を継続、実用化を目指します。また、SRF無線プラットフォームに関しては、本実証実験の結果を活かし、工場において安定した無線通信を利活用できるプラットフォームとして実用化を目指し、研究開発及び標準仕様の策定と認証制度の整備を推進していく」との考えを示している。
各機関の役割分担
NICT:実験システム構築・実験実施及びデータ分析
トヨタ自動車:実験環境整備及び実験実施支援
技術資料
無線環境のリアルタイム可視化技術
無線環境のリアルタイム可視化技術は、電波計測用のセンサからのビーコン情報を収集・統合し、その情報を解析した結果を管理画面上のフロアマップ上に描画する(図3参照)。同技術は、複数のセンサから収集したビーコン情報を基にフロア内の電波強度の変化を推定することで、電波到達範囲を可視化する。また、ビーコンのBSSIDの情報を基に登録端末か否かを照合し、登録外端末の場合は電波強度からその位置を特定する(図4参照)。
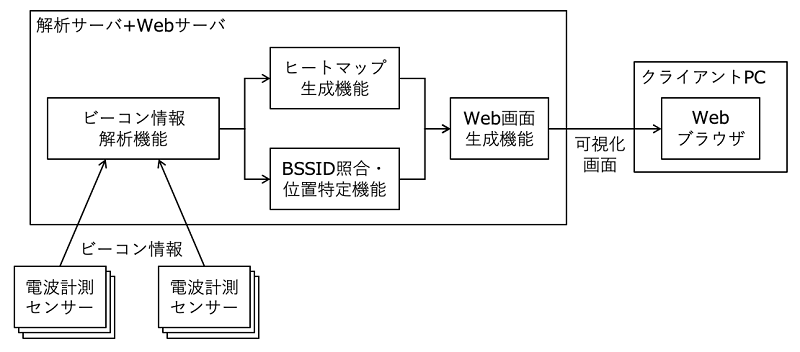
図3:無線環境のリアルタイム可視化技術の機能構成図
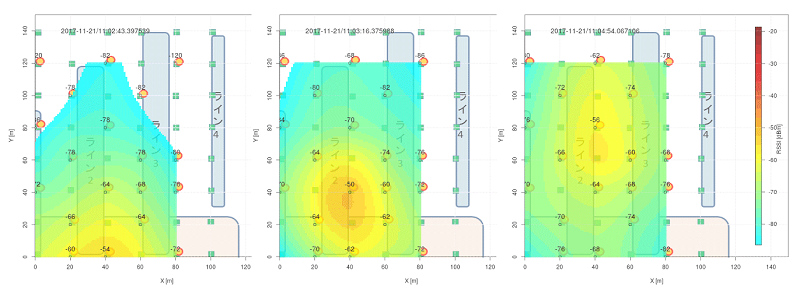
図4:無線環境のリアルタイム可視化技術の管理画面イメージ
登録外端末の上方向への移動に合わせて、可視化画面での電波強度のピーク(黄色)が移動している。
SRF無線プラットフォーム
SRF無線プラットフォームでは、Field Manager(管理サーバ)が複数の無線システム間のリソースの調整を行うグローバル制御を行い、SRF Gateway/Device(無線機器)が単一の無線システム内の通信を最適化するローカル制御を行う(図5参照)。同プラットフォームは、無線環境センサからの情報を基に、グローバル制御とローカル制御が協調連携して、他のアプリケーションの通信状況に応じて通信に使用するチャネルや通信速度を適応的に制御することで、無線区間での干渉を回避して通信遅延の抑制を実現する。
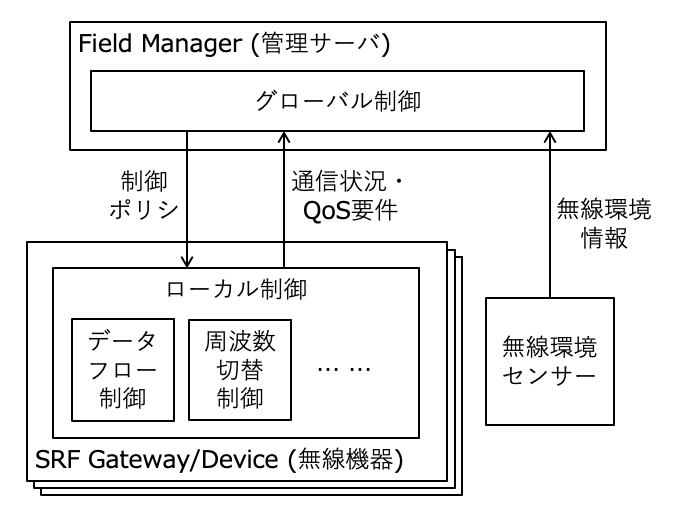
図5:SRF無線プラットフォームの機能構成図